|
MAGIKS
1.1
Manipulator General Inverse Kinematic Solver
|
|
MAGIKS
1.1
Manipulator General Inverse Kinematic Solver
|
Public Member Functions | |
| def | __init__ |
| def | clear |
| def | value |
| def | in_target |
Public Attributes | |
| settings | |
| current_value | |
| is_in_target | |
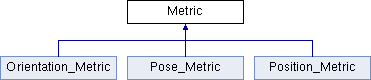
Metric includes everything regarding the error between two positions or orientations.
Definition at line 160 of file pose_metric.py.
| def __init__ | ( | self, | |
settings = Metric_Settings() |
|||
| ) |
Definition at line 164 of file pose_metric.py.
| def clear | ( | self | ) |
Definition at line 170 of file pose_metric.py.
| def in_target | ( | self, | |
| current, | |||
| target | |||
| ) |
Definition at line 183 of file pose_metric.py.
| def value | ( | self, | |
| current, | |||
| target | |||
| ) |
Definition at line 178 of file pose_metric.py.
| current_value |
Definition at line 173 of file pose_metric.py.
| is_in_target |
Definition at line 176 of file pose_metric.py.
| settings |
Definition at line 167 of file pose_metric.py.
 1.8.8
1.8.8

